

Punktene vi skal diskutere i dette kapittelet er:
Hastighetsnøyaktighet/jevnhet/levetid og vedlikeholdbarhet/støvgenerering/effektivitet/varme/vibrasjon og støy/eksosmottiltak/bruksmiljø
1. Gyrostabilitet og nøyaktighet
Når motoren drives med jevn hastighet, vil den opprettholde en jevn hastighet i henhold til tregheten ved høy hastighet, men den vil variere i henhold til motorens kjerneform ved lav hastighet.
For børsteløse motorer med slisse vil tiltrekningen mellom de slissede tennene og rotormagneten pulsere ved lave hastigheter. Men i tilfellet med vår børsteløse, slisseløse motor, siden avstanden mellom statorkjernen og magneten er konstant i omkretsen (som betyr at magnetomotstanden er konstant i omkretsen), er det usannsynlig at det produseres krusninger selv ved lave spenninger. Hastighet.
2. Levetid, vedlikeholdbarhet og støvutvikling
De viktigste faktorene når man sammenligner børstemotorer og børsteløse motorer er levetid, vedlikeholdsvennlighet og støvgenerering. Fordi børsten og kommutatoren er i kontakt med hverandre når børstemotoren roterer, vil kontaktdelen uunngåelig slites ut på grunn av friksjon.
Som et resultat må hele motoren byttes ut, og støv på grunn av slitasje blir et problem. Som navnet antyder har børsteløse motorer ingen børster, så de har bedre levetid, vedlikeholdsvennlighet og produserer mindre støv enn børstemotorer.
3. Vibrasjon og støy
Børstemotorer produserer vibrasjoner og støy på grunn av friksjon mellom børsten og kommutatoren, mens børsteløse motorer ikke gjør det. Slissede børsteløse motorer produserer vibrasjoner og støy på grunn av spormoment, men slissede motorer og hulkoppmotorer gjør ikke det.
Tilstanden der rotorens rotasjonsakse avviker fra tyngdepunktet kalles ubalanse. Når den ubalanserte rotoren roterer, genereres vibrasjoner og støy, og disse øker med økende motorhastighet.
4. Effektivitet og varmeutvikling
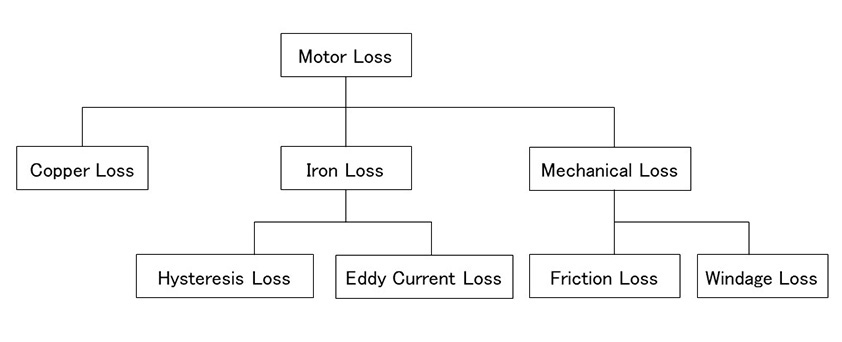
Forholdet mellom den mekaniske energien som utgår og den elektriske energien som tilføres er motorens virkningsgrad. De fleste tapene som ikke blir til mekanisk energi blir til termisk energi, som vil varme opp motoren. Motortap inkluderer:
(1). Kobbertap (effekttap på grunn av viklingsmotstand)
(2). Jerntap (hysteresetap i statorkjernen, virvelstrømtap)
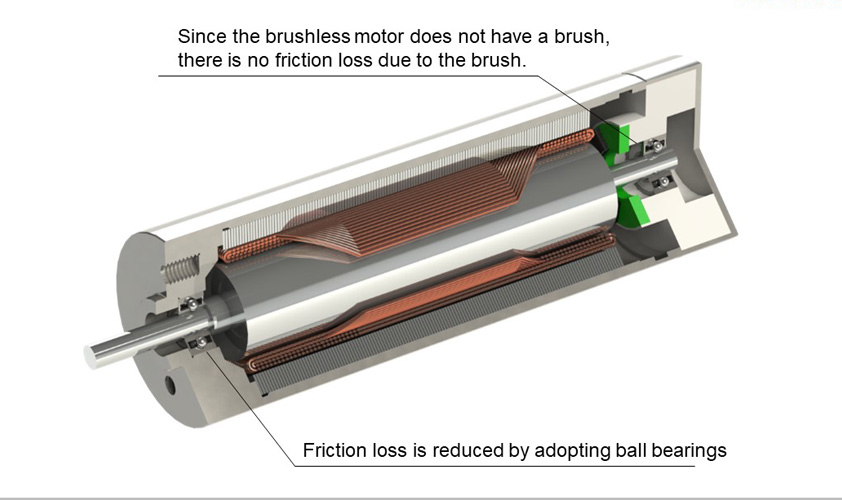
(3) Mekanisk tap (tap forårsaket av friksjonsmotstand i lagre og børster, og tap forårsaket av luftmotstand: tap av vindmotstand)
Kobbertap kan reduseres ved å tykne den emaljerte ledningen for å redusere viklingsmotstanden. Hvis den emaljerte ledningen imidlertid gjøres tykkere, vil viklingene være vanskelige å installere i motoren. Derfor er det nødvendig å designe viklingsstrukturen som er egnet for motoren ved å øke duty cycle-faktoren (forholdet mellom leder og tverrsnittsareal av viklingen).
Hvis frekvensen til det roterende magnetfeltet er høyere, vil jerntapet øke, noe som betyr at den elektriske maskinen med høyere rotasjonshastighet vil generere mye varme på grunn av jerntapet. Ved jerntap kan virvelstrømstap reduseres ved å tynne ut den laminerte stålplaten.
Når det gjelder mekaniske tap, har børstemotorer alltid mekaniske tap på grunn av friksjonsmotstanden mellom børsten og kommutatoren, mens børsteløse motorer ikke har det. Når det gjelder lagre, er friksjonskoeffisienten til kulelagre lavere enn for glidelagre, noe som forbedrer motorens effektivitet. Våre motorer bruker kulelagre.
Problemet med oppvarming er at selv om applikasjonen ikke har noen grense for selve varmen, vil varmen som genereres av motoren redusere ytelsen.
Når viklingen blir varm, øker motstanden (impedansen) og det blir vanskelig for strømmen å flyte, noe som resulterer i en reduksjon i dreiemomentet. Dessuten, når motoren blir varm, vil magnetens magnetiske kraft reduseres på grunn av termisk avmagnetisering. Derfor kan ikke varmegenerering ignoreres.
Fordi samarium-koboltmagneter har en mindre termisk avmagnetisering enn neodymmagneter på grunn av varme, velges samarium-koboltmagneter i applikasjoner der motortemperaturen er høyere.
Publisert: 21. juli 2023